
Temporary working platforms – technical guidance on New Zealand Good Practice
ABSTRACT
The design and construction of temporary working platforms for cranes and piling rigs is a high-risk activity and requires the careful selection of the appropriate input parameters to obtain the correct load cases as well as the application of robust and reliable design methods to assess the required thickness and stiffness of the working platform.
The Temporary Works Forum New Zealand is currently developing a technical guidance document on New Zealand Good Practice for the design and construction of granular working platforms for cranage and piling works.
The document introduces some of the most common and most relevant guidelines for working platform design which are currently used in New Zealand and around the globe. The authors will compare (i) the applicability of the different design methods for various ground conditions, (ii) the underlying design assumptions about load transfer and (iii) the consideration of static and/ or dynamic load factors in the different design approaches. In addition, the most suitable soil investigation techniques and methods to be used for the initial ground investigation are introduced and discussed and some recommended verification method for working platform certification are presented.
The authors will also use examples to demonstrate some of the limitations and related risks of each method introduced.
Introduction
Working platforms are widely used in the New Zealand construction industry to support heavy construction plant and machinery and to provide safe working conditions. Working platforms are particularly common for piling plant and mobile cranes. During the operation of piling plant and mobile cranes, very high and concentrated track pressures can be imposed on the substrata. This in turn can lead to significant deformation of the substrate and subsequent overturning of plant. Plant failures as a result of working platform failures have occurred in New Zealand and overseas in the past.
Working platforms can comprise granular fill placed on the substrata (with or without geosynthetic reinforcement) but may also comprise complex falsework on deep foundation elements. This paper focuses on granular working platforms, which will from hereon be referred to as working platforms for simplicity.
Multiple methods exist to design working platforms. All reliable methods require careful selection of input parameters for both, substrata parameters and load cases.
The Temporary Works Forum New Zealand (TWf (NZ)) is currently developing a technical guidance document on New Zealand good practice for the design and construction of granular working platforms for mobile cranes and piling works. This paper will provide some preliminary considerations that are to be included in the technical guidance document.
Design Methods
Overview of methods
Historically, methods to design working platforms have been reliant on previous experience of suitable materials and dimensions. CIRIA Special Publication 123 (CIRIA 1996) and BRE 470 (BRE 2004) introduced analytical design procedures for working platforms. BRE470, especially, has since been in wide use by piling contractors around the globe.
In 2019 the Temporary Works Forum in the UK published TWf2019:02: A guide to good practice for the design of granular working platforms for construction plant (Temporary Works Forum 2019), which is freely available. This document provides a review of the above methods and recommends an alternative approach to the design of working platforms. The authors recommend that the readers familiarise themselves with this document. The New Zealand technical guidance document will provide additional guidance specific to New Zealand, to be used in conjunction with TWf2019:02.
In addition to the above methods, several methods are utilised by manufacturers of geosynthetics. These methods are generally empirically based and combine the results of laboratory testing and field observations. They focus on the use of geosynthetic reinforcement in the platform construction with the aim of reducing the overall platform depth. However, they tend to be limited to the manufacturer’s specific products, and therefore won’t be discussed further in this paper. The authors encourage manufacturers of geosynthetics to conduct their own comparison with established methods, especially the TWf2019:02 method.
Given the limited use of CIRIA SP123 in New Zealand, this paper will focus on BRE470 and TWf2019:02 only. Both methods are discussed briefly and for more details, please refer to the specific documents.
British Research Establishment BRE470 method
The British Research Establishment BRE470 method (BRE 2004) provides guidance on good practice for the design, specification, installation, operation, maintenance and repair of working platforms for tracked plant and the document contains guidance on all the above-mentioned aspects. The BRE470 method for working platform design is widely used in the New Zealand construction industry. It is commonly considered as a safe and reliable method to design working platforms for tracked and mobile construction equipment.
Key aspects of the BRE470 method include:
- The consideration of two load cases:
- Case 1 loading applies to conditions in which the plant operator is unlikely to aid recovery from an imminent platform failure. Examples are travelling or lifting; and
- Case 2 loading may apply when the plant operator can control the loading safely. An example is the extraction of a piling auger. Lower load factors apply to case 2 conditions;
- Loading is applied as a rectangular uniformly distributed load, based on effective track width;
- The method relies on classic bearing capacity calculations for the substrata. However, the method relies on punching failure as its main resistance mechanism in the platform material, instead of load spread (Fig. 1);
- No overburden effects from the surcharge and platform fill are considered on the bearing capacity assessment;
- Deformations are not directly considered. Instead, deformation limits are deemed to be satisfied by checks on bearing capacity;
- Strength reduction factors on the platform and substrata properties are proposed as unity, so that design values are equal to characteristic values;
- The method applies to uniform substrata only, which may require averaging (when appropriate) or selection of lower bound values if multiple soil layers are to be considered;
- Calculations are provided for both, cohesive and granular substrata conditions;
- For cohesive substrata, it is noted that the punching shear failure mechanism only applies for substrata with 20 kPa < cu < 80 kPa. For undrained shear strength cu < 20 kPa the ground will be too soft and more sophisticated types of design calculations are required. For cu > 80 kPa the bearing resistance is deemed to be sufficient to general support construction plant without the design of a working platform; and
- Geosynthetic reinforcing is considered to provide additional vertical restraint at the punching perimeter, instead of providing additional lateral restraint.
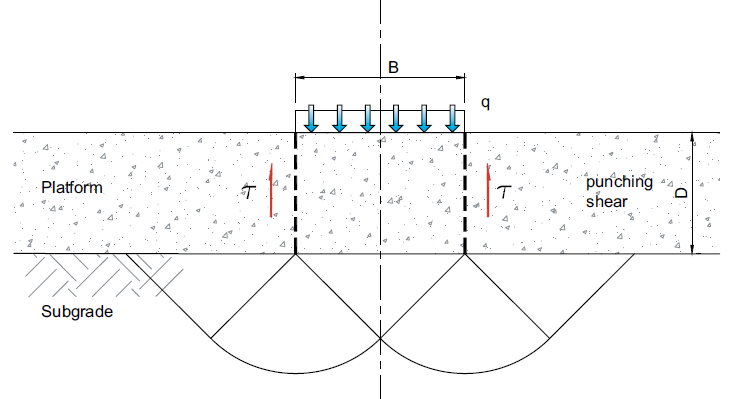
Figure 1: Shear resistance due to punching failure as per BRE470 method (Temporary Works Forum 2019)
Temporary Works Forum TWf2019:02 method
The recently published TWf2019:02 (Temporary Works Forum 2019) method proposes an alternative method to SP123 and BRE470, to comply with EC7. The method is discussed in detail in the document and will not be reiterated here. In summary, a few key aspects of the method include:
- Design actions are derived in accordance with EC7;
- Partial strength reduction factors are applied to the design strength of substrata and platform material properties;
- Ultimate Limit State (ULS) checks on bearing capacity and Serviceability Limit State (SLS) checks on immediate settlement need to be carried out;
- The method allows for multiple substrata layers, including potentially weaker layers at depth;
- Load spread through the platform and substrata is calculated using the Boussinesq theory;
- The maximum load spread in the platform is explicitly limited to 2V:1H;
- Lateral pressure (confinement) in the platform or upper substrata layers is considered; and
- The method relies on load spread only, without allowance for punching shear resistance.
Applicable ground conditions
Both methods introduced in this paper are applicable for cohesive and granular ground conditions.
In complex ground conditions or conditions which are not covered by the two methods introduced in this paper, it is recommended to carry out advanced design methods using finite element methods to obtain safe and realistic stability and settlement predictions.
Table : Applicability of the two methods in different ground conditions.
| BRE470 | TWf2019:02 | |
| Cohesive substrata | Partial
(20 kPa < cu <80 kPa) |
Yes |
| Granular substrata | Yes | Yes |
| Multiple soil layers | No, design based on worst conditions | Yes |
| High ground water | Yes, simplified approach | Yes |
Load Transfer
The load mechanism of the transfer of the track pressure applied by construction plant through the working platform employed in the BRE470 method mainly relies on punching shear failure mechanisms (Fig. 1). This load transfer mechanism greatly simplifies the complex load transfer from the tracked plant into the subgrade. Punching failure might be a realistic failure mode in cohesive subgrade but in granular subgrade conditions, bearing failure in accordance with the Meyerhoff failure criterion is more likely to occur, which takes lateral soil confinement into account.
Details about the assumed fundamental failure mechanisms of the two methods described in this paper can be obtained directly from the relevant documents and are beyond the scope of this paper.
Static and dynamic load factors
Both, the design methods used in BRE470 and TWf2019:02 include design factors to account for levels of uncertainty in the parameter selection (input) to the calculation and provide robustness to the method.
The method described in BRE470 uses a bespoke variable load factor system, ranging from 1.05 to 2.0 (Table 2), which are applied to the characteristic load values applied by the construction plant. These load factors vary depending on whether the load case is deemed to be a recoverable or non-recoverable condition (Case 1 or Case 2). Load factors also vary through the calculation process based on the stage of the design process. Typically, higher load factors are used initially to check whether the in-situ subsurface ground conditions can support the track loads without a designed working platform. Lower factors may be applied in ongoing projects due to the greater certainty in material properties. No strength reduction factors are applied to geotechnical parameters, but a strength reduction factor of 2.0 is applied to geosynthetic reinforcement.
Table 2: ULS load factor values applied in BRE470
| Load Case 1 | Load Case 2 | |
| Check whether subgrade can support plant without platform | 2.0 | 1.5 |
| Check that platform material can provide adequate bearing resistance | 1.6 | 1.2 |
| Calculation of platform thickness | 1.6 | 1.2 |
| Check of platform without reinforcement (where geosynthetic is included in design) | 1.25 | 1.05 |
Due to this variability, there is no direct comparison between the load factors used in this process and combination factors given in AS/NZS 1170.0:2002 Structural Design Actions Part 0: General Principles (Standards Australia 2002).
The method described in TWf2019:02 allows the use of various partial factors throughout the calculations to apply different limit state approaches. Three different limit state combinations are discussed in TWf2019:02: SP123 and combinations 1 and 2 in accordance with the UK Annex to EC7.
Table 3: ULS partial factors for use in TWf2019:02
| EC7 comb 1 | EC7 comb 2 | SP123 | AS/NZS1170.0* & B1/VM4^ | ||
| Permanent action | (γG) | 1.35 | 1.00 | 1.00 | 1.20* |
| Variable (imposed) action | (γQ) | 1.50 | 1.30 | 1.00 | 1.50* |
| Cohesion | (γC) | 1.00 | 1.40 | 1.25 | 1.00* |
| Shear angle | (γφ) | 1.00 | 1.25 | 1.25 | 1.00* |
| Resistance | (γR) | 1.00 | 1.00 | N/A | 1.67-2.22^ |
Only EC7 combination 1 can be directly compared to the ULS combination factors given in AS/NZ1170. It is noted that the use of EC7 combination 2 and SP123 partial factors will tend to produce more conservative results, particularly for platforms on granular formations. This is due to the influence of the partial factor γφ which is applied to the shear angle of the soil and results in a significant reduction of the bearing capacity factor Nγ. Care should be taken when considering the use of EC7 combination 2 or SP123 partial reduction factors for the design of working platforms on granular foundations as these may not be suitable for this application.
In the absence of robust research into the use of New Zealand partial factors in this method, caution is recommended when this approach is used. Results should be compared against the partial factor combinations proposed in TWf2019:02.
Some international standards provide wind load cases for mobile cranes. For example: Australian Standard
AS 1418.5 (Standards Australia 2013) stipulates a 10 m/s wind speed for in service conditions and 15 m/s for out of service conditions for mobile cranes, which can be considered to be applicable to piling rigs, too. Such loads need to be taken into consideration for the assessment of loads applied by plant and equipment and are usually not part of the scope of the working platform designer.
Dynamic load factors for the working platform design are not considered by either method introduced in this paper and the applied track bearing pressures are applied as static loads. Dynamic load factors are typically not considered in the design of working platforms and only static load cases are utilised.
Dynamic loads are typically addressed in the assessment of the load applied by the specific type of plant, not in the platform design itself. It is particularly important for piling plant to consider such dynamic effects, notably for plant with high centres of gravity, such as Continuous Flight Auger (CFA) rigs, where the drill motor is typically located close to the top of mast during the travelling mode. Dynamic loading can occur especially after sudden changes of direction (during travelling), decelerating or by moving down a grade.
Subgrade Investigation and working platform Verification
Substrata investigation
In order to provide a safe and economic design for working platforms, it is important that the platform designer has an adequate understanding of the soil conditions below the working platform. Uncertainties about substrata conditions are inherent to geotechnical engineering, and the design of working platforms is no exception. Prior to commencing the platform design, a suitable ground model should be developed, based on site specific geology and available site investigation data. Such a model should include the selected soil layers (up to sufficient depths), soil parameters and groundwater conditions. Key challenges specific to obtaining information on substrata for working platforms include:
- Lack of good quality investigation data in shallow depths, e.g. due to predrilling of CPTs or wash boring of fill layers (those shallow depth investigation data are critical for working platform designs);
- Lack of specific ground investigation if working platforms are to be constructed outside the main alignment of permanent works; and
- General hesitance to commission additional ground investigation for the purposes of working platform design, in cases where the investigations underpinning the permanent works design is not sufficient.
Early planning of construction methodologies and associated temporary works, including the requirement for working platforms will increase the likelihood of the main body of investigations to be suitable. Although it may not be feasible to provide all details, such as plant size and lift plans, in such an early stage, approximate construction methods and locations of required platforms will increase the likelihood of economic designs.
It is recommended that the temporary works designer is consulted on the details of the ground investigation program. Such data will provide more clarity on the shallow substrata, which is of great influence on the performance of working platforms but is often omitted in the investigations for permanent works design.
Shallow investigations should be conducted to sufficient depth (see further discussion below). BRE470 requires a minimum testing depth of 2 meters below the base of platform. The TWf2019:02 method uses the Boussinesq pressure bulbs to determine the depth of influence applied by construction plant. For designs requiring bearing capacity checks only, the minimum testing depth is equivalent to 3 times the track width (or 1.5 times the outrigger pad width), with a minimum depth of 2 m and at least one investigation to 5 m depth. For designs requiring settlement checks, the method suggests that these depths are doubled. It should be noted that the above is indicative only, and the working platform designers must satisfy themselves that the ground investigation is of sufficient detail to meet the design requirements.
A detailed overview of all existing shallow ground investigation techniques is outside the scope of this paper. Methods to obtain more information on the shallow strata include but are not limited to trial pits, window samplers and hand-held equipment such as hand-held shear vanes, dynamic cone penetrometers (DCP) and hand augers. Results obtained using hand-held equipment, despite its popularity in New Zealand, should be treated with caution, as these are highly operator dependent. The revolving speed of the handheld shear vane, for example, has a direct effect on the measured value. It is also noted that the correlations for DCP results to strength parameters are approximate at best and lacking adequate scientific background (Harwood 2012).
The presence of groundwater should always be considered in the design of working platforms. Granular substrata are especially susceptible to the presence of groundwater. Designers should be aware that due to seasonal and tidal variations, groundwater tables may vary significantly from those encountered in the initial site investigation. Additionally, construction activities may significantly change groundwater flows and drainage patterns, notably on large infrastructural works or subdivisions involving substantial earthworks.
Platform material
The strength parameters of the placed platform fill are important input parameters for the platform design. It is therefore important that both, the fill material and the placement method are sufficiently specified in the design. TWf2019:02 provides some indicative values for expected characteristic shear strength values for platform fill (Table 4). It should be noted that the requirement of quality control increases with increased assumed strength parameters.
Table 4: Indicative strength parameters for platform fill (Temporary Works Forum 2019)
Some additional considerations include (Temporary Works Forum 2019):
- Contamination, e.g. by drilling fluid/slurry, can greatly decrease the strength of the platform fill. Placing the platform fill on a separation layer of geofabric can reduce this particular risk; and
- Maximum aggregate size should be the lesser of 150 mm and 2/3rd of the platform thickness. Further reductions in aggregate sizes might be required due to operational constraints and should be assessed on a project specific basis (e.g. less than 75 mm for driven piles and/ or CFA operations).
Working platform verification
The verification of working platforms is critically important. Working platforms should not be loaded by plant before the full certification is carried out and documented by the working platform designer or a suitably qualified geotechnical engineer. The working platform certification should be carried out using a platform certificate which includes crucial details like critical design assumptions, assumed plant loading, a sketch of the platform dimension (including edge distances) and a signature of the platform designer and verifier. Details of working platform certificates can be obtained through the Federation of Piling Specialists UK (FPS) or the Temporary Works Procedural Control Good Practice Guideline which has recently been developed in New Zealand (Temporary Works Forum New Zealand 2019).
The certification of working platforms should be based on in-situ testing to assess the bearing capacity and the degree of compaction of the relevant working platform or a specific area of it.
Plate load testing is a suitable method to access the bearing capacity of the working platform in the direct vicinity of the test location. It is recommended to carry out multiple plate load tests across the platform to assess potential variabilities in the strength of the platform and the subgrade. Plates should be suitably sized in relation to the platform thickness and the particle sizes used for the working platform construction.
Alternatively, for low risk working platforms only, proof rolling can be carried out by water trucks, excavators, or other suitable construction equipment to simulate the bearing pressure of the mobile crane or piling rig. The observed load displacement behaviour will indicate the expected performance of the platform and provide valuable details to the platform certifier, who should witness and observe proof rolling on site.
In addition to the verification of the bearing capacity of the constructed platform, compaction testing such as dynamic cone penetrometer testing (DCP) or nuclear densometer testing shall be carried out in various locations across the platform to prove the degree of compaction of the platform material and to identify any potential ‘soft spots’. This could be done in combination with plate load testing as described above.
If ground water conditions are likely to fluctuate due to seasonal or tidal influences, the certifier should ensure that the ground water conditions on site and during the usage and design life of the specific platform are in accordance with the design assumptions. This could be achieved by providing adequate drainage or dewatering, or by monitoring ground water and providing alert levels for the use of the platform.
Other Considerations
Legislation and guidance
All work involving the design, installation, operation, maintenance and removal of working platforms must comply with the requirements of the Health and Safety at Work Act 2015 (HSWA) and all associated regulations. All stages of the lifecycle of the design and management of granular crane or piling platforms should be managed through robust temporary works procedural control measures. The Temporary Works Procedural Control Good Practice Guideline (Temporary Works Forum New Zealand 2019) provides guidance on how to control temporary works risks as far as reasonably practicable.
Site specific risk assessments of the temporary works are to be carried out by the Temporary Works Coordinator and the development of a robust brief to be provided to the designer are essential to ensure that the working platform design and it’s construction are suitable, safe and sufficient. Careful planning can provide design economies, but inadequate planning can lead to unsuitable, inefficient or incomplete designs.
Appropriate load inputs
The load conditions which will be experienced by the working platform during its design life are converted into simplified stress distributions applied by the construction plant to input into the design calculations.
It is the responsibility of the contractor (or subcontractor) to provide maximum ground pressure loading from the plant items to the platform designer. Load combinations should be considered in all operating conditions (standing, handling, lifting, drilling, extracting, travelling and erection/dismantling) and in all orientations. These can be calculated using plant manufacturer’s software and websites or through the use of calculation spreadsheets such as the Rig Loading Spreadsheet developed by the Federation of Piling Specialists (FPS).
It should be noted that it is often not the largest rig or the heaviest lift which is most critical in the platform design. The influence of track dimensions should also be considered as those are directly related to the depth of influence for the design. TWf2019:02 recommends using this approach, defined by a Boussinesq pressure bulb projected beneath the tracks, to determine the minimum required depth for ground investigation.
Both BRE470 and TWf2019:02 require plant loading to be modelled as rectangular uniformly distributed loads which are directly applied to the working platform. Where load inputs are provided as trapezoidal or triangular distributions, the method described by Meyerhof (Meyerhof 1953) can be used instead.
Interaction with other works
The design of temporary crane and piling platforms should be carried out with consideration of the influence of the platform on other structures or assets on the site or adjacent sites. These may include both, permanent works and/or other temporary works. These interfaces should be clearly communicated in the temporary works design brief and checked throughout construction activities.
Working platforms may apply significant temporary loadings to adjacent structures. However, these aspects of design are not covered in the above described methods. Where this is the case, the relevant loading information should be provided. It is the responsibility of the Temporary Works Coordinator for the project to provide this information to the relevant permanent works designer/ temporary works designer/ asset owner. Careful planning of different interfaces at the design stage is important for risk mitigation.
The temporary works design brief should also identify any additional known hazards including, but not limited to: (i) buried services, (ii) backfilled trenches, (iii) local soft spots, (iv) wet piles or (v) piles holes during construction, (vi) excavations or (vii) slope stability hazards.
Slope Stability
The design methods discussed above are based on working platforms constructed on a level subgrade. BRE470 states that the method is not suitable for subgrade slopes more than 1V:10H.
For any project where the existing or construction phase topography may be at risk of local or global slope instability due to the loads applied from any platform, a slope stability assessment should be carried out. This is outside the scope of the design methods introduced in this document, however the risks associated with these hazards should be addressed adequately. It should be noted that in many cases, the slope stability design will be more extensive and complex than the platform design and may require additional ground investigation and the involvement of an experienced geotechnical practitioner.
Operational constraints
The completed working platform design should clearly communicate the limitations and operational restrictions to the contractor. This may include aspects such as:
- Maximum allowable design loading for the platform;
- Operational restrictions such as slew restrictions or lifting positions for critical lifts;
- Details of plant access routes to the platform, considering grade limits of the specified plant;
- Areas for assembly of plant (boom length should be considered for crawler crane erection);
- Operational constraints for minimum edge distances to side slopes or other hazards;
- Maintenance requirements and responsibilities (e.g. re-certification); and
- Acceptable settlement limits (if required).
Example
The practical application of both methods introduced in this paper for cohesive and granular ground conditions, summarizes the different results provided by the BRE470 method and the TWf2019:02 method.
The examples provided in tables 5 to 6 are for illustration only and shall not be used for any project application. The authors want to emphasise that it is the responsibility of the working platform designer to make their own assessment of critical loading (including the effective track length), design parameters and to perform the proper calculations. The authors will under no circumstances be liable for any loss, damage, cost or expense incurred or arising out of or in connection with any use of the data presented in tables 5 and 6.
Table 5 compares the results of both methods when used with an example tracked crawler crane applying 150 kPa bearing pressure, distributed over the effective track length on cohesive and granular subgrades of different strengths and no geosynthetic materials. Table 6 summarises the results for an example piling rig applying 250 kPa bearing pressure over the same conditions. Platform fill with a similar internal friction angle was used and the verification of adequate compaction of the platform fill of site was achieved.
Table 5: EXAMPLE – working platform thickness for 150 kPa bearing pressure on different subgrades
Table 6: EXAMPLE – working platform thickness for 250 kPa bearing pressure on different subgrades
| Ground conditions | BRE470 | TWf2019:02 |
| Cohesive cu = 25 kPa (no ground water) | 0.80 m | 1.00 m |
| Cohesive cu = 50 kPa (no ground water) | 0.30 m (min thickness) | 0.30 m (min thickness) |
| Cohesive cu = 75 kPa (no ground water) | 0.30 m (min thickness) | 0.30 m (min thickness) |
| Granular, loose to medium dense sand, ground water at 0.5 m depth below ground level |
1.00 m | 0.60 m |
| Granular, loose to medium dense sand, ground water at 1.5 m depth below ground level |
0.75 m | 0.55 m |
| Granular, loose to medium dense sand, ground water at 3.0 m depth below ground level |
0.50 m | 0.40 m |
The examples provided in tables 5 and 6 indicate that the TWf2019:02 method calculates higher working platform thicknesses in soft cohesive conditions, but lower thicknesses for conditions with high ground water levels, compared with the BRE470 method. For subgrade conditions of firm to hard cohesive soils, both methods predict similar working platform requirements. Also, the outputs are comparable for loose to medium dense sands with ground water levels of more than 1.5 m below ground surface. In all cases, the variance between the design outputs from the two methods is increased with greater track pressures.
The sensitivity of the results in granular ground conditions to the location of the ground water level reinforces the duty of care of the designer to make reasonable assumptions about the expected ground water conditions and to take seasonal or tidal variances into account.
Conclusions
Various industry bodies published guidelines which introduce simplified methods to design working platforms on cohesive and granular subgrade conditions to assist geotechnical practitioners with the design and the verification of working platforms for tracked construction plant. This paper compares the key elements and principles of the BRE470 method and the more recently developed TWf2019:02 method.
The design of temporary working platforms requires the reliable input of the applied loading conditions of tracked or stationary construction plant. In most cases, dynamic effects are not considered in the design of working platforms. However, in the case of piling plant, dynamic effects should be considered.
For the example working platform on firm/ stiff clay or medium dense sand (with groundwater levels of more than 1.5m below ground surface), both methods provide comparable results. The TWf2019:02 method provides more economical results in loose to medium dense, granular subgrade with high ground water tables. The TWf2019:02 method also allows for ground models with multiple soil layers. As a result, this method is more complex in its application, which need to be considered by the platform designer.
The design of working platforms is a high-risk activity and should only be carried out by experienced geotechnical practitioners with sufficient knowledge and experience in the field of working platform design and certification. It is strongly recommended that the design and certification of temporary working platforms is carried out or certified by competent and locally registered Chartered Professional Engineers.
References
BRE 2004. BRE470 Working platforms for tracked plant: good practice guide to the design, installation, maintenance and repair of ground-supported working platforms. Watford: BRE.
CIRIA 1996. Special Publication 123. Soil reinforcement with geotextiles. London: CIRIA.
Harwood, N. 2012. A Review of Shallow Foundation Practice in New Zealand, New Zealand Geomechanical News, Issue 84, December 2012, pp 82-94, Auckland: NZGS.
Meyerhof G G 1953. The bearing capacity of foundations under eccentric and inclined loads. Proceedings of 3rd International Conference on Soil Mechanics and Foundation Engineering, Zurich, vol 1, pp 440–445.
Meyerhof G G 1974. Ultimate bearing capacity of footings on sand layer overlying clay. Canadian Geotechnical Journal,
vol 11, no 2, May, pp 223-229.
Standards Australia/Standards New Zealand 2002. Structural Design Actions Part 0: General Principles (AS/NZS1170.0:2002). Sydney: SAI Global.
Standards Australia. Cranes, Hoists and Winches (AS1418.5:2013). Sydney: SAI Global.
Temporary Works Forum 2019. TWf2019:02 Working Platforms: Design of granular working platforms for construction plant. A guide to good practice. London: Temporary Works Forum.
Temporary Works Forum New Zealand 2019, TWf(NZ) GPG01:2019 Temporary Works Procedural Control Good Practice Guideline, New Zealand: TWf(NZ)
The Crane Industry Council of Australia 2017, CICA-GN-0013-A CIC & CANZ Guidance Note – Crane Stability and Ground Pressure. Australia: CICA.