
Rockfall Modelling for Coastal Transport Corridor Recovery following the November 2016 M7.8 Kaikōura Earthquake
1. Abstract
On November 14th 2016, a Magnitude 7.8 (Mw) earthquake occurred in the South Island of New Zealand, centred approximately 60km south-west of the coastal town of Kaikōura. The complex sequence of ruptures resulted in significant damage to a number of major roads and transport corridors, including the Inland Kaikōura Road, State Highway 1 (SH1) and the adjacent Main North railway Line (MNL), cutting off all land routes into Kaikōura.
The mountains of the Seaward Kaikōura Range rise abruptly from the adjacent coastline, with a limited platform along the coast forming the narrow transport corridor. Significant damage was incurred from large scale rockfall and rock avalanches triggered by the earthquake. Initial recovery efforts focussed on removal of the nearly 1 million cubic metres of rock and debris which inundated the road and rail, in order to allow access for the repair and improvement of the transport corridor.
Rockfall modelling encountered a number of major challenges in the initial recovery phase, with a significant number of large complex slips, limited site information, and rapidly evolving rockfall problems. Considerable efforts were focussed on gathering specific rockfall information from site, which in turn was used to calibrate 2D rockfall models and inform the type and extent of temporary protection needed to ensure the safety of staff working in close proximity to the slips. This paper summarises the key challenges and innovations in understanding, modelling, and effectively mitigating rockfall risk during the initial recovery phase of the project.
2. Introduction
Over 80 landslides occurred along the section of the transport corridor surrounding Kaikōura following the initial earthquake, with numerous additional failures observed in the weeks and months afterwards. The scale and number of these landslides severely impacted State Highway 1 (SH1) and KiwiRail’s Main North Line (MNL), with approximately 10km of the transport corridor to the south of Kaikōura and 14km to the north of Kaikōura the most heavily affected. Among these landslides, a number of major landslides failed resulting in extensive debris cones inundating the road and rail corridor.
As well as the initial earthquake-generated mass failures, the significant shaking experienced during the earthquake resulted in extensive fracturing and ground damage in the colluvium and rock forming the slopes above the transport corridor. Associated ground damage effects of the earthquake included tension cracking and dilation of rock outcrops, as well as large scale removal of soil and vegetation leading to increased potential for further instability. This resulted in numerous large scale active rockfall source areas, as degradation of the damaged slopes released material downslope. These failures were observed to occur both as a result of rainfall and aftershocks, as well as continued “fair weather” releases of material.
The highly active nature of the rockfall source areas resulted in continued progradation of the debris cones at the base of slopes, cutting off access to recovery efforts, as well as causing serious risk to workers attempting to access site. In order to allow removal of the debris to begin design and construction of temporary protection measures needed to be undertaken, to reduce the risk posed from unexpected rockfall generated from the slopes above.
Figure 1: Ohau point landslide debris covering SH1

3. Initial recovery phase
In order to begin the process of clearing debris from the transport corridor, the first step involved creating safe access for staff and heavy plant to the slip sites along the coastline. Due to the linear nature of the transport corridor in this area, and the narrow coastal platform this corridor inhabits, large scale landslides at numerous locations completely inundated this platform, effectively blocking access to the sites further along the coast. As such, temporary protection was required in order to allow safe travel past active rockfall sites, in order to begin recovery works at multiple areas along the affected section of coastline.
As well as the development of large debris fans at the base of slopes, the extensive damage to the rock mass within the failure areas resulted in a considerable amount of debris remaining on the slope itself. In order to remove material from this on-slope source extensive helicopter sluicing was carried out to encourage the movement of this material downslope. As a result of this, the profile and location of the debris fan continued to change as more material was deposited at the slope toe. Rockfall modelling therefore required frequent updates to account for the changing behaviour of the hazard with time. Furthermore, once the material had been transported downslope, coordinated efforts between the design and site teams were needed to develop plans for the safe removal of the deposited material, in a way which limited exposure to the risk of rockfall from above. As the shattered ridgeline and colluvium deposits continued to generate rockfall as the debris fan was gradually removed, further updates were required for rockfall modelling in order to take into account the changing nature and material parameters of the newly exposed areas of the slope face.
A range of short term protective measures were used, tailored to the specific nature of each slip and the available space at the slope toe. Larger sites with significant debris fans used this deposited material to create catch benches and protective bunds, which were able to be deconstructed and reformed as earthworks progressed with the removal of debris; while smaller sites which produced less material incorporated a range of short term measures including shipping containers, water filled barriers and concrete block walls. At sites where the rockfall risk could not be demonstrably reduced to an acceptable level to allow contractors to work below the slips, remotely controlled excavators were used to carry out work until the appropriate level of protection could be achieved. Operation controls were also heavily engaged in order to protect staff travelling below rockfall sites, with the use of spotters, traffic control, and remote monitoring to identify changing hazards and coordinate with teams working on the slopes; as well as strict controls on work in response to rainfall or aftershock events.
Figure 2: Inundation of SH1 and MNL

Figure 3: Helicopter sluicing

Figure 4: Rockfall catch ditches and earth bunds, forming safe access around Ohau Point

4. Significant challenges for modelling and design
Due to complexity of the hazards present across the wider project area, the timeframe within which work was being carried out, and the separation between site and the design office, a number of significant challenges were encountered in the development of designs for protective measures in the early phases of the project. The NCTIR programme of works was a disaster recovery effort. This required decisions to be made early without the level of supporting information or investigation which would normally be undertaken on the projects if they were pre-planned and done in isolation.
Complex source areas, and sites which exhibited multiple hazards such as rockfall, debris flows, and shallow landslides meant that, in many cases, protective measures were required to cope with a number of different hazards at the same time. Continued deposition of material downslope meant that surveys of slope profiles became out of date within days, and the processing time required to get up-to-date survey information meant that often this information was obsolete by the time it reached the design office.
Complicated source areas and the variations in the source rock/colluvium between individual sites meant that it was not possible to develop consistent rockfall material parameters for use across the project. The rapidly evolving slopes meant that both on-slope material parameters, and the distribution of rock sizes modelled, needed to be frequently updated. The separation between the design office (based in Christchurch), and the site itself meant that it was not possible for the design team to witness these changes in person, and so were reliant on the accurate translation of this information from site based teams. With limited time for rigorous testing of design solutions, verification of the effectiveness of the protective measures needed to be carried out on site, with results relayed back to the design team and used to inform the next round of modelling.
The particular challenges of this project required innovative solutions and sources of information in order to ensure the accurate modelling and design of protective structures. The greater understanding of the on-site hazards this developed allowed for rapid assessments of changing sites, and the effective communication of the risks posed to staff and equipment. This allowed for the most appropriate and informed decisions on risk and protective measures to be made by the site team, in order to ensure the safety and efficiency of recovery works, and the protection of site staff working in hazardous areas.
Figure 5: Abseil scaling and targeted sluicing

4.1 From challenges to design inputs
Whilst a number of features of the recovery effort acted to constrain the level of detail which could be afforded to the design process, namely the complexity of the site and the speed at which recovery works were undertaken, other aspects of how this work was undertaken acted to facilitate the development and testing of solutions within the time frames required.
Efforts at removing unstable rocks from the source areas were concentrated initially on the use of intensive, targeted helicopter sluicing, made possible by the close proximity of the work area to the ocean. This allowed teams of 3-4 helicopters to work in rotation on a single slope to saturate and dislodge unstable sections of the on-slope debris. Once the most hazardous sections of the slope and the larger scale features had been treated to the point where the slope was considered safe enough to allow abseil access from the slope crests, targeted removal of individual loose rocks was undertaken by crews of abseil teams using hand tools, airbags, and explosive and non-explosive charges. The combined approach of helicopter sluicing and targeted scaling resulted in a huge volume of material being transported down the slope in a semi-controlled environment; with the operational controls in place to facilitate safe access to site meaning that these falling rocks were able to be directly observed and recorded by spotters and on-site geologists. The observations of these induced rockfall events acted to significantly increase the understanding of the ways in which rocks travelled down the slope, reflecting both wet weather and dry weather releases in the use of sluicing and scaling, respectively.
In the initial months after the earthquake, the large landslides which cut off road access to the majority of the project area meant that helicopters needed to be used to shuttle staff between work sites. The unstable nature of the slopes meant that abseil work and inspections of the slope needed to be completed from above, with site geologists and abseil teams flown to landing platforms upslope of the major slips and scaling work coordinated from there. These helicopter flights provided numerous opportunities every day to carry out aerial inspections of source areas and slopes, as well as facilitating the gathering of useful photos and videos of the source and deposition areas of slips whilst travelling between work sites. This information, along with the rockfall observations discussed previously, contributed significantly to the design process, allowing for a much greater understanding of the behaviour of falling rocks across variable sites, and so greater accuracy and reliability in the development of predictive rockfall models within a short timeframe.

5. Key aspects of the design process
A number of important aspects and sources of information were identified throughout the initial recovery stages which contributed greatly to the overall rockfall modelling and design process. Many of these are of particular importance and relevance to the specific nature of the Kaikōura earthquake recovery works, however the lessons learned from this process present significant benefits to future disaster recovery works. The main inputs and information sources for this process are discussed in this section.
5.1 Baseline slope surveys
Initial slope surveys were generated from LiDAR information, with pre-earthquake profiles generated from a LiDAR Digital Elevation Model flown in 2012. Post-Earthquake LiDAR and aerial photography capture was flown in November 2016, allowing the generation of post-earthquake cross sections from this source. The comparison of cross sections generated from these two surveys was used to determine the significant areas of slope failure and material deposition, as well as the type of mass failures exhibited at certain sites. In areas where significant material deposition inundated the lower slopes, the pre-earthquake cross sections were used to infer the approximate location of historic rock and talus surfaces, informing initial targeted clearing works and the estimation of debris volumes. In the initial months of the recovery effort, slope profiles for rockfall modelling were based on the post-earthquake LiDAR surfaces, with profiles for upslope source areas used directly from this survey. As the continued deposition of material downslope acted to change the profile of the lower slopes, the profile, slope angle and gradual progradation of the debris lobe at the slope toe was captured in site notes from on-site geologists overseeing recovery works. These notes were used to infer the development of surface profiles for the debris lobes used in rockfall modelling.
Figure 6: 3D rockfall modelling to determine critical rockfall pathways
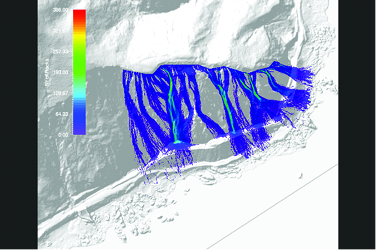
Post-earthquake surveys were used in a number of ways to generate cross sections for rockfall analysis. At complex sites, qualitative 3D rockfall modelling was used to infer the most probable rockfall pathways downslope using RAMMS:Rockfall. The nature of this software was not suited to the wide variation in material parameters observed on site, so this program was used as an initial screening tool to determine the most critical areas of slope for modelling. At less complex sites, where the main rockfall chutes and pathways are more obvious, or open slopes mean there are no obvious concentrations of rockfall trajectories, adjusted water drop analysis was carried out along with site notes and observations on observed rockfall pathways, in order to develop 2.5D or “quasi-3D” modelling. This involves determining the horizontal rockfall trajectory on the X-Y plane by identifying preferential pathways rocks are observed to travel down, and then translating this into a 2-D profile for use in the traditional 2D modelling program RocFall.
Throughout the project, project-wide LiDAR imagery was updated at approximately 6 month intervals. Sites which exhibited significant changes in the intervening periods due to earthworks or natural failures, rendering the survey information out of date, had individual surveys carried out using UAV scans. Due to the lead time involved in getting this survey information (approx. 2-4 weeks for UAV due to demand and processing requirements), often it was not possible to work with the most up to date surveys from site. As such, alternative methods were used to infer changes in the slope profile, including site measurements and 3D photogrammetry modelling.
5.2 Detailed site notes and recording of rockfall information
During the initial recovery works, concentrated sluicing and scaling efforts meant a large number of “rockfall events” were being artificially created in a semi-controlled environment. Combined with the presence of spotters at either side of the base of slips, and on-site geologists positioned at slope toe and crest, this allowed for the opportunity to observe numerous rockfall trajectories on-slope and at the slope toe. The large volume of data gathered during this phase allowed for the development of dependable rockfall models, calibrated to the observations of rockfall behaviour at each individual site. Additionally, the use of helicopters for site flyover inspections allowed for detailed descriptions of source areas and the potential range of rock sizes within these sources. A number of key observations, and their inputs to the design process are described below.
5.2.1 Rockfall source areas and slope characteristics
A key component of the development of rockfall models and their relevance to the problem in reality is the recording of accurate and up to date site mapping. This included a wide range of observations, translated to the design team through site notes, and annotated photos and site maps. The type of information gathered included:
- Location and activity of source areas, including the size and frequency of released material, the trigger events causing these releases, the dominant mode of failure at an individual source/site (i.e. discrete rockfall, debris flows, mass slides etc.)
- Dominant rockfall pathways, with estimations for the percentage of rocks observed to travel down individual pathways
- Key on-slope features such as chutes which concentrate rockfall pathways, or launching points which significantly affect rockfall trajectories
- Ongoing development of slope features, such as progradation of the debris fan, the change in material types on the surface of this debris fan following sluicing and scaling, or the movement of islands of vegetation in the upper source areas
- Material characteristics across the slope, with descriptions of roughness and material types for debris, colluvium, soil cover and exposed rock
5.2.2 Rockfall characteristics
Due to the wide variation of materials and rockfall characteristics across the greater project area, it was not possible to develop consistent material parameters for use across multiple discrete sites. As such, rockfall models were individually calibrated to the direct observations of rockfall at each site. This required specific detailed information on rockfall behaviour, which allowed for comparison and calibration between modelled and observed behaviour. Specific measurements and observations included:
- Bounce heights of rocks at various positions on the slope, including: in the upper debris fields, at the location of any significant launching points (where the location of the first bounce after this point was also noted), along the debris fans at the slope toe, and at the original road location
- Stopping points of falling rocks, with general indications of the percentage of rocks noted to come to rest at various sections of the slope and debris fan, translated as “contour lines” of percentage of rocks passing a certain point, annotated on site photos and aerial images
- Any observations on rockfall translational or rotational velocity, with specific notes on if/how these factors affected the travel of the rocks downslope or their final resting point, and any observed links between these velocities and the size/shape of rocks or trigger event which caused them to fall down the slope (e.g. rainfall, sluicing, scaling, or impact from rocks launched from upslope entraining debris as they travel downslope)
5.2.3 Boulder size estimates
Estimates of boulder sizes forms one of the most critical components of rockfall modelling, as this is a critical component in determining rock impact energy. Specific information recorded included:
- Estimated distribution of boulder sizes remaining in the source area (size range, 50th, 95th and 99th percentile boulder sizes, as well as the weighting of the distribution);
- Estimates of boulder sizes and coarseness of material forming the debris cone at slope toe (this parameter is related to the roughness of the debris slope, and is a controlling factor in rockfall trajectories along the runout area);
- Estimates of boulder sizes reaching the toe of slope, and any observations which indicate different behaviour for different rock sizes (e.g. larger rocks are observed to roll with low bounce heights and high rotational velocity, smaller rocks are observed to have higher bounce heights, with lower rotational velocity)
- Rock sizes at source and at point of deposition, to determine whether the rock quality in this source area means large rocks travel down the slope intact, or fragment as they travel
Where possible, boulder sizes were measured to give accurate volume estimates. Initial attempts at recording slope observations indicated that due to the high activity levels of the rockfall sources, it was neither practical nor safe to measure the rocks in the runout zone by hand. It was also found that estimations of individual boulder volumes were highly subjective, with little frame of reference for site staff to estimate volumes against. As such, falling rocks were grouped into more easily identifiable sizes, in order to bring more consistency to the process. This involved developing a range of equivalent boulder size estimates allowing for much more rapid, repeatable estimation of volumes. This allowed for rapid estimation of boulder sizes and size ranges, when individual large releases upslope could result in 10-100 boulders reaching the slope toe at the same time. For more accurate calculation of volumes for the larger, more critical boulders, this could be carried out after sluicing and scaling had been halted at the end of the day, as these larger boulders were unlikely to be covered by debris during the subsequent releases of material downslope. In less active areas these measurements could be carried out by hand, however in more exposed areas this could be carried out using methods such as 3D photogrammetry modelling or measured from calibrated scaled photos using apps like Split-Engineering (discussed in Section 5.3 below).

5.3 Visual media
One of the methods of capturing site information which proved to be of the greatest benefit to the design process was the effective use of visual media. This took on a variety of forms, based on the specific information which needed to be conveyed to the designers, and could be transmitted quickly from site to design office, facilitating quicker turnaround times on individual designs, as well as developing a greater understanding of the scope of site hazards, and the changes to these hazards on a daily basis. The analysis of this information also provided robust, dependable information for design inputs, and allowed design teams to spend time analysing individual aspects of an event or site in order to extract the information they needed. The applications and methods used are summarised in the following sections, with a brief description of some of the lessons learned through the early stages of the project.
5.3.1 Daily flyover photos
Part of the operational controls installed to reduce the exposure of site staff to risk involved carrying out daily flyover inspections of the individual sites along the project area. These flyover enabled site geologists to observe the changes to individual sites on a daily basis, as well as having the ability to assess the site for unexpected overnight instability or slips before allowing staff onto the work site. Initially this flyover was documented by taking photos with a smartphone, and relaying these images to the design office. The images however were often of low quality, partially obscured by reflections in the helicopter windows, or out of focus. The relatively narrow field of view and low resolution on fixed focal length camera phones meant that in order to capture sharp images of the source areas and slips, photos often had to be taken from quite close to the area of slope face in question, so lacking the context of the wider slip. Significant improvements were made to this process by assigning a DSLR site camera with high resolution, a wide angle to telephoto zoom lens, and a large sensor size. This enabled higher image quality to be captured in wider ranging light conditions and from further away from slope, allowing for greater context in site photos, and the ability to zoom into fine details on the slope. The camera used for this application came with built in GPS tagging capabilities, allowing photos to be included in GIS maps and accurately placed on site, so that individual photo locations and dates can be catalogued for future reference. Additionally major improvements were made to the quality of helicopter based photos by simple changes to the process of capturing photos, such as making sure to use helicopters for the flyover inspection which allowed for shooting out the open window side window, rather than through the glass, eliminating problems with the camera focussing on the glass instead of the slip.
5.3.2 Videos of rockfall generated from sluicing and scaling
Due to the presence of spotters and site geologist around the slips, and the fact that the majority of people carry relatively capable digital cameras in their mobile phones, it was possible to capture numerous videos of rockfall generated during scaling and sluicing efforts from a wide range of different angles and aspects. Instances where multiple rocks fall at once as part of a larger release have too much information to be captured in site notes, but with time to analyse a video, the behaviour of these individual rocks can be assessed. This enabled designers to visualise the rockfall at multiple points along the slope, and further analysis of these videos proved to be a significant source of reliable information to inform the design process.
For example, a particularly useful rockfall video would show the progress of a falling rock down the lower debris fan, travelling out to reach the road at the slope toe. By identifying features on the slope which are present in both the video and the aerial site imagery from the post-earthquake LiDAR survey, it is possible to determine the approximate distance the rock travels down the slope over a given portion of the video clip. By analysing the location of this rock at various time-steps within the video (or the number of frames it takes for the rock to travel a certain distance, for a known framerate), it is possible to estimate the velocity at which the rock is travelling at various points on the slope. If it is possible to measure the rock after it has come to rest, or if in the video the rock passes an object of a known size such as a roadside barrier or shipping container, it is also possible to estimate the size of the rock relative to this object. This information then allows for: the estimation of bounce heights on the slope; distance covered between bounces, and time spent in the air; and given some assumption on rock volume and density, the approximate kinetic energy the rock has as it travels down the slope. All of these inputs are invaluable in the design of effective protective measures.
5.3.3 In-photo measurements using scaled imagery
Figure 7: Rockfall debris covering SH1

In locations where it was not possible to measure rocks due to safety concerns, photos could be analysed using the program Split-Engineering. This involves analysis of photos taken on a mobile phone using the Split-Camera app. This uses the known field of view of the camera being used, and measures the distance to objects using the built-in autofocus in order to generate scaled photos which can be analysed using the Split-Desktop software. This allows for detailed measurements of individual aspects of a photo, including individual boulder sizes, or the distribution of particles sizes within a debris pile. Using phone cameras from the distances required to safely separate staff from the rockfall hazard above, this was less accurate, and was eventually superseded by the use of scaled 3D photogrammetry models.
5.3.4 3D photogrammetry modelling
3D photogrammetry modelling involves capturing images of an object from a range of different angles, and then processing these photos with a program (Bentley ContextCapture in this instance) which identifies matching pairs of pixels between adjacent images. By mapping how these pixel locations changes across multiple photos, a very accurate 3D representation of the object can be formed. This process was used to create 3D models of entire slip sites with a very high degree of visual resolution, as well as a surprisingly high level of detail and accuracy in mapping the 3D structure of the sites. A wide range of inputs could be used to generate 3D models, depending on the level of accuracy needed in the final product. Simple models of slopes, intended to give a broad overview or a quick update of the site in question, could be captured from as little information as a 10 second video of the slip, taken from a helicopter window while travelling to another site. These 3D models could be processed in a matter of minutes, and gave a significantly better overview of the whole slip than could be conveyed using photos alone, as they allow the viewer to zoom into individual features of the slope, or to rotate and move around the slip to view features from different angles.
Figure 8: A basic 3D model created with frames from a single flyby video, taken with a mobile phone camera. Frame locations shown in top image
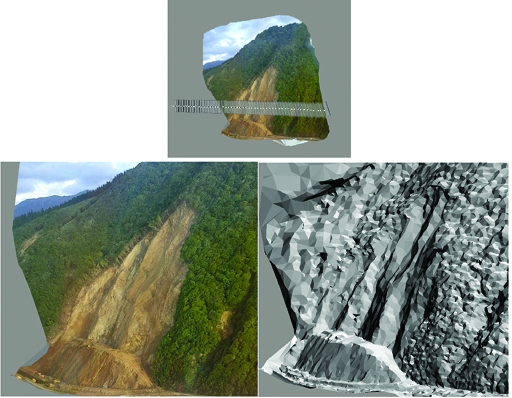
Figure 9: A more detailed 3D model, created from individual photos shot with a DLSR style camera. Photo locations shown in top image
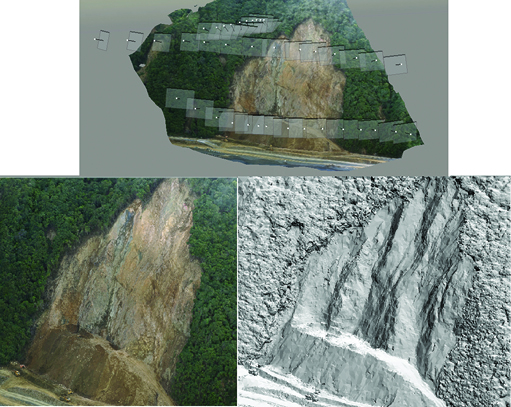
For more detailed models, the GPS enabled DSLR site camera was used to capture source images. These typically consisted of approximately 50-400 individual photos depending on the slip size, and were taken over the course of 2-3 passes of the slip in a helicopter at different elevations, capturing images of the slope and its features from a range of oblique and acute angles. The approximate flight time required to capture these images varied with the size of site, but was typically less than 5 minutes spent taking photos, with processing in the office typically carr