
Use of UAV mounted /Structure-from-Motion (SfM) data capture for engineering geological landslide mapping
Abstract
Accurate, high-resolution topographic models are fundamentally important for detailed engineering geological mapping. Nevertheless, high economic costs of topographic data collection are often exacerbated by remoteness of field sites, rendering cheaper, more portable surveying platforms (i.e. terrestrial laser scanning or GPS) impractical. An alternative is Structure-from-Motion (SfM) photogrammetry, which allows for rapid, high-resolution modelling of terrain, comparable in resolution to LiDAR (~0.1 m), but at a fraction of the cost. Utilising SfM in conjunction with Unmanned Aerial Vehicles (UAVs) as means of a low-altitude survey platform, this allows for rapid collection of terrain imagery, with a minimum of ground-control-points. The imagery is then used as a basis for construction of high-resolution engineering geological maps in a 3D space. SfM generates high-resolution topography and co-registered texture (colour) from an unstructured set of overlapping photos taken from varying viewpoints and known camera orientations. The techniques were applied to the coastal landslide at Ohuka (Port Waikato), and the Kepa Road landslide, Auckland. Both of these slope failures are complex, with head and lateral scarps delineating the extent of failure, and irregular surface topography indicative of more recent slope failures in the form of flows, slips and compressional features. The SfM imagery captured the wide range of engineering geological features in a high degree of detail as 3D digital elevation models. In addition, sequential studies can be used for 4D landslide assessments. Hence, the SfM application represents an effective, financially viable alternative to traditional topographic surveying and LiDAR, particularly for practical application in remote, inaccessible regions.
1 INTRODUCTION
Landslide monitoring requires continued assessment of the extent, rate of displacement, surface topography, and detection of fissure structures that could be related to fracture processes. Measurements of vertical and horizontal displacements improve the understanding of landslide mechanisms. Digital Elevation Models (DEMs) are indispensable information sources in such engineering geological assessments of landslides, and modern remote sensing technologies have greatly facilitated the creation of DEMs for landslide monitoring and hazard mitigation. Measurements at high spatial resolution and sub-meter accuracy are required for the investigation at local scales (c. 1:10,000), where topographic information is often acquired from airborne or terrestrial photogrammetry or laser scanning. Over the last decade, Light-Detection and Ranging (LiDAR) has been utilised in a wide number of sites and environments to provide high resolution (<0.5 m) surface representations because of its ability to penetrate vegetation and to acquire dense, precise point-clouds (James et al., 2017). Nevertheless, costs of LiDAR equipment and deployment remain rather high, so frequent repeat acquisitions to provide high temporal resolution are, therefore, not always feasible.
1.1 Unmanned Aerial Vehicles (UAVs)
A more cost-effective approach to development of high resolution DEMs for landslide mapping and monitoring is to utilize Unmanned Aerial Vehicles (UAVs) as a platform for data capture. Indeed, the use of UAVs for landslide mapping has emerged in recent years and is evolving due to technological developments such as autopilot systems, quality digital cameras, miniature GPS, and advances in lightweight carbon fibre airframes. Recent developments in UAV technology provide exciting new opportunities for data capture to support ultra-high resolution (1–20 cm resolution) mapping and monitoring. Key advantages of UAV-mounted cameras for landslide mapping include their superior spatial resolution, the capacity to fly on-demand at critical times, and their capability of carrying multiple sensors (Lucieer et al., 2014).
1.2 Structure-from-Motion (SfM)
In addition to advances in UAV technology outlined above, recent advances in photogrammetric image processing and computer vision have resulted in the Structure-from-Motion (SfM) technique. In contrast to traditional photogrammetry, SfM uses algorithms to identify matching features in a series of overlapping digital images and calculates camera location and orientation from the differential positions of multiple matched features. From these calculations, overlapping imagery is then used to reconstruct a “sparse” or “coarse” 3D point cloud model of the photographed object or surface or scene. This 3D model from the SfM method is usually refined to a finer resolution using Multi‐View Stereo (MVS) methods, thereby completing the full SfM‐MVS workflow (Carrivick et al., 2016). The technique was originally designed for 3D reconstructions of building facades (Koutsoudis et al., 2014), but is now often used in geomorphology and landslide mapping e.g., Lucieer et al., 2014).
1.3 Aims
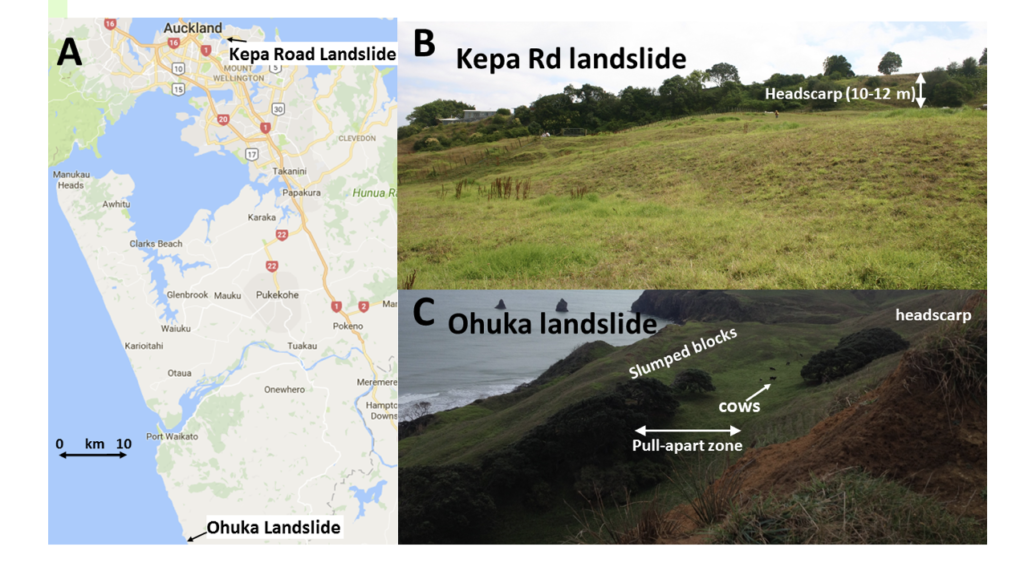
The aim of this paper is to apply the UAV-SfM image acquisition and processing technology to the engineering geological mapping of two landslides: (1) Kepa Road Landslide on the margins of Orakei Basin, Auckland; and (2) Ohuka Landslide, 14 km south of Port Waikato (Figure 1). In addition, we contextualise the effectiveness of our results with other published studies that have also proven the utility of UAVs combined with SfM for landslide mapping and monitoring.
2 STUDY AREAS
2.1 Kepa Road Landslide, Orakei Basin, Auckland
The Kepa Road Landslide is within the Pourewa Landslide Zone, which includes four major prehistoric landslides (Brook et al., 2017a): Ngapipi Road Landslide, Kepa Road Landslide, St Josephs Landslide, and Pourewa Landslide. Kepa Road Landslide is the only landslide of the four, which is thought to remain unstable. The landslide is located on the north-eastern bank of the Orakei Basin in Auckland, 4.5 km east of Auckland CBD (Figure 1). It is 300 m wide, and extends 200 m from toe-to-headscarp horizontally, and 50 m vertically. Previous work (Franklin, 1999) reported the original failure was probably a translational block-slide, displacing ~2 million m3 of lithified tuff rock between 7-10 ka. The initial translational failure was likely due to: (1) a favourably-oriented extremely weak layer of residual clay at the top of the East Coast Bays Formation (ECBF); (2) high pore-water pressure at the top of the clay and the base of the overlying tuff, decreasing shear strength; (3) removal of the toe-slope by fluvial activity and Holocene marine transgression. Since the original slide, a range of secondary slope failures have occurred within the landslide complex, periodically reactivated in response to rainfall-induced pore-water pressure fluctuations, and are typically confined to the upper soil layers. The Orakei Basin is one of the volcanoes of the Late Quaternary Auckland Volcanic Field, which erupted about 85,000 yrs BP phreato-magmatically, resulting in a central crater surrounded by a tuff ring (Nemeth et al., 2012). The tuff ring is generally stable except for the northeast side because of its steep slope, underlain by Miocene Waitemata Group East Coast Bays Formation.
2.2 Ohuka Landslide, Waikato coast
The Ohuka Landslide (Brook et al., 2017b) is a coastal mass movement complex located on the west coast of the North Island, 14 km south of Port Waikato (Figure. 1). It extends for 500 m along the coast, is 200 m from toe-to-headscarp, with the top of the headscarp 84 m above the toe. Toward the base of the mass movement is the 1 Ma Kidnappers Tephra, and the slope is assumed to either have failed initially as a block slide or rotational slump facilitated by a residual clay seam during the mid-Holocene (Chappell, 1964; Arthurs, 2011). The lowermost units are Early Miocene (23-16 Ma) in age and contain layers of mudstone with low angles of internal friction and peak/residual shear strengths that can facilitate planar failure.
Figure 1: (A) Location of Kepa Road Landslide in Orakei Basin, Auckland, and Ohuka Landslide, Port Waikato coast; (B) Kepa Road Landslide; (C) Ohuka Landslide
3 METHODS
A Dà-Jiāng Innovations (DJI) Inspire 1 drone (Figure 2) equipped with a Zenmuse X3 camera was used to acquire datasets of 200-300 overlapping aerial photographs at each landslide. Up to 20 ground control points (GCP’s; plastic mats and man-made features) were geo-located with a real-time kinematic global positioning system (RTK-GPS).
Figure 2: DJI Inspire 1 UAV taking off near a black and white GCP (Ohuka Landslide).

The acquisition-processing workflow is summarised in Figure 3. The image datasets were input into Agisoft Photoscan version 1.2.6 to construct full-colour orthophoto, DEM, and 3D models. First, in Photoscan each image was individually inspected for image quality where blurry images were removed from the dataset. Camera positions were loaded from the photo exchangeable image file data and calibrated with camera parameters during an “alignment” process with NZTM2000.
Figure 3: UAV-SfM data acquisition and processing workflow

The camera alignment process matches points between overlapping imagery and estimates the camera positions for each photo to construct a sparse point-cloud model. The following settings were selected for the camera alignment process: very high accuracy, reference pair preselection, 40,000 key point limit and a 10,000 tie point limit (e.g., Agisoft, 2016).
4 RESULTS AND DISCUSSION
The processed orthomosaics and shaded relief maps are shown in Figures 4 and 5, for Kepa Road Landslide and Ohuka Landslide, respectively. As can be seen from the surface models, the key engineering geomorphological features are clearly visible.
Figure 4: Kepa Road Landslide models: (A) UAV-SfM oblique georeferenced orthomosaic (250 images) and (B) shaded relief model; (C) LiDAR 1 m digital surface model (DSM; courtesy of Auckland Council, 2013)
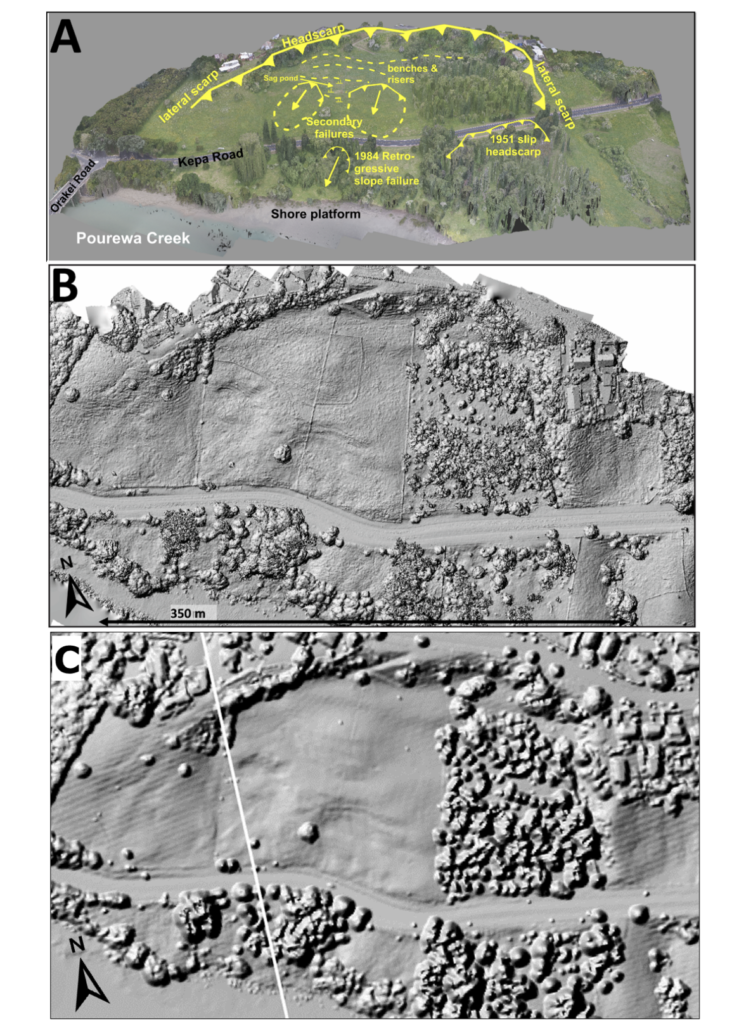
Microtopography is further enhanced on the grey-scale shaded relief models, which are comparable with typical LiDAR data (only available here for Kepa Road Landslide). At the Kepa Road Landslide, the key engineering geological features visible on the UAV-SfM image and shaded relief map include features of both the original failure, and more recent 20th/21st century slope reactivation. The prominent arcuate headscarp marks the upslope extent of the landslide, and the lateral scarps along both margins are from the original failure.
More recent landslide reactivation is indicated by the depressions in the centre left marking a sag pond, as well as undulating benches and risers (Figure 4). A recent LiDAR 1 m digital surface model (DSM) is shown for comparison in Figure 4C. As can be seen from the models, topographic expression on the quickly (1 hour on site) and cheaply acquired UAV-SfM model is superior to that of the LiDAR shaded relief DSM (Auckland Council, 2013).
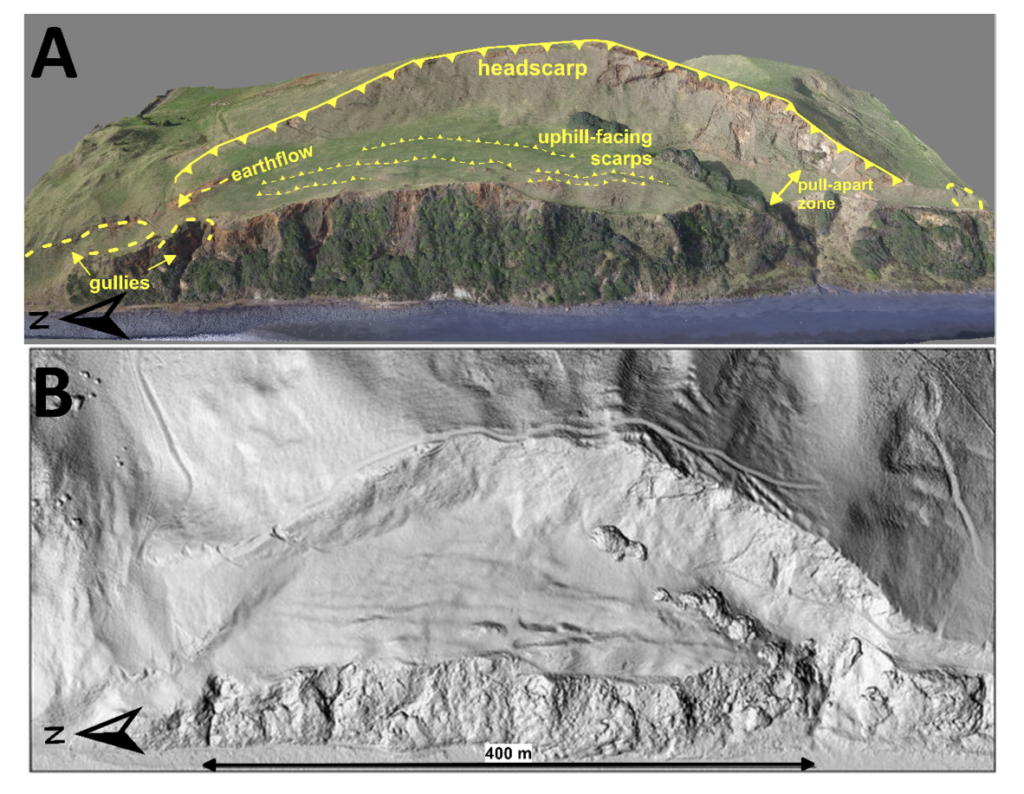
Likewise, the UAV-SfM model of Ohuka Landslide (Figure 5) also shows the key engineering geological features in detail. In particular, landslide features include a large arcuate scarp, flanked by gullies, which indicate the lateral boundaries of initial slope failure. Other topographic features include a ∼200 m wide bench with several uphill-facing scarps, pull-apart zones, and surface flows from ongoing reactivation. The series of uphill-facing scarps is indicative of several slump blocks rather than a singular large-scale slump block
Figure 5: Ohuka Landslide UAV-SfM derived data: (A) oblique georeferenced orthomosaic (270 images); (B) shaded relief model
To summarise, this study presents a mapping workflow for landslides based on UAV imagery and SfM algorithms at two sites on the North Island. This allowed the possibility of detailed mapping of engineering geological landforms at a range of spatial scales. As the above examples demonstrate, the apparent logistical and cost advantages of SfM (limited hardware needs and portability) are, at least in part, offset by processing times compared to ‘data-ready’ methods such as LiDAR, terrestrial laser scanning (TLS) or GPS. In addition, a number of sources of uncertainty can be identified using UAV-SfM approach. Different illumination conditions during image acquisition are a source of uncertainty, including direction of solar illumination and shadowing and diffuse light. This can be somewhat overcome by positioning of GCPs (Westoby et al., 2012).
5 CONCLUSIONS
The examples of the two landslides outlined here were ideally suited to the application of the SfM technique. Minimal vegetation coverage and relatively complex, heterogeneous topography at both the intermediate and micro-scales allows the extraction of suitable amounts of keypoint descriptors for consistent, dense point-cloud coverage. Our results are part of a longer-term 4D monitoring program, using multi-temporal UAV-acquired imagery and SfM algorithms for 3D surface reconstructions, combined with subsurface geophysical investigations. This allows for accurate monitoring of landslides, using feature tracking correlation and DEM differencing (i.e. 4D).
REFERENCES
Agisoft, (2016) Agisoft PhotoScan User Manual. Professional Edition, Version 1.2.
Arthurs, J. (2011) The nature of sensitivity in rhyolitic pyroclastic soils from New Zealand. PhD thesis, University of Auckland.
Auckland Council, (2013) LiDAR data. Retrieved from: https://data.linz.govt.nz/layer/3405- auckland-lidar-1m-dem-2013/
Brook, M.S. et al (2017a) Assessing reactivation of the Pourewa Landslide Zone, Auckland, New Zealand, using Structure-from-Motion, LiDAR, and geophysics. Geophysical Research Abstracts Vol. 19, EGU2017-10816, Vienna, Austria.
Brook, M.S. et al (2017b) Structure-from-Motion (SfM) and Electrical Resistivity Tomography (ERT) evaluation of the Ohuka landslide, North Island, New Zealand. Geophysical Research Abstracts Vol. 19, EGU2017-10807, Vienna, Austria.
Carrivick, J. et al. (2016) Structure from Motion in the Geosciences. Wiley, Chichester.
Chappell, J. (1964) Quaternary geology of South-west Auckland and North Taranaki coast. MSc thesis, University of Auckland.
Franklin, J.T. (1999) Geology of the Orakei Basin. MSc thesis, University of Auckland.
James, M.R. et al. (2017) Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 280: 51-66.
Kousoudis, A. et al. (2014) Multi‐image 3D reconstruction data evaluation. Journal of Cultural Heritage 15(1): 73-79.
Lucieer, A. et al. (2014) Mapping landslide displacements using Structure from Motion (SfM) and image correlation of multi-temporal UAV photography. Progress in Physical Geography 38(1): 97-116.
Nemeth, K et al. (2012) Amplified hazard of small-volume monogenetic eruptions due to environmental controls, Orakei Basin, Auckland Volcanic Field, New Zealand. Bulletin of Volcanology 74(9): 2121-2137.
Westoby, M. et al. (2012) ‘structure-from-motion’ photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 179: 300-314.